Para hacer enjambres de robots del tamaño de abejas, los investigadores proponen nuevos enfoques de diseño y fabricación para reducir el tiempo y los recursos.
Los insectos son animales sociales. Un equipo de hormigas puede transportar cooperativamente material de más de 100 veces su propio peso, y en los calurosos días de verano, las abejas se alinean frente a su colmena y sincronizan el aleteo de sus alas para generar un flujo de aire dentro y fuera de la colmena, enfriando la temperatura interna. .
El estudio de estos comportamientos colectivos podría permitir que los futuros robots realicen tareas similares a las de los insectos, como la polinización. Durante los últimos 20 años, los especialistas en microrobótica han estudiado cómo construir robots del tamaño de insectos.
Aprovechando la física interesante a pequeña escala, los científicos han construido pequeños robots con funciones similares a las de los insectos, ausentes en los robots más grandes, como un robot saltador de 1 centímetro de largo que puede tener hasta 40 veces su tamaño; pequeños robots de cuatro patas que pueden caminar sobre la superficie del agua y escalar paredes y techos; Pequeños robots voladores que pueden sentarse en las hojas, encender luces en vuelo o incluso realizar volteretas en pleno vuelo.
Si bien son impresionantes, estos robots funcionan individualmente debido a la dificultad de fabricación y las limitaciones de la durabilidad del robot. Tradicionalmente, la mayoría de los robots pequeños tienen un diseño aburrido y un montaje manual, lo que limita su funcionamiento a un enjambre. Sin una gran cantidad de ellos, los robots pequeños tendrán dificultades para trabajar en tareas complejas.
Con el objetivo de permitir el vuelo de enjambres similares a insectos, los investigadores del MIT han propuesto nuevos métodos de diseño y fabricación que reducen el tiempo y los recursos cuando se trata de producir estos diminutos robots enjambres.
Diseño automatizado y fabricación escalable mediante impresión 3D
Tradicionalmente, los microrobots se han diseñado utilizando software comercial de diseño asistido por computadora (CAD) generalmente diseñado para el diseño y la fabricación a gran escala de componentes de robots.
En la microfabricación, los componentes 3D que componen los microrobots se componen de muchas capas de materiales 2D. Por ejemplo, una estructura simple, como una bisagra de ala, se compone de nueve capas de material y los patrones de diseño de estos materiales están todos interconectados. Cuando se utiliza software comercial, el diseñador debe crear manualmente patrones de diseño para las 9 capas. Si es necesario actualizar un único parámetro de diseño, el investigador debe modificar manualmente los nueve gráficos, lo que puede llevar mucho tiempo y provocar errores de diseño.
en estudiar Recientemente fue publicado en sistemas inteligentes avanzadosEl equipo del MIT desarrolló un enfoque de diseño específico en el que el investigador solo necesita especificar algunos parámetros importantes y luego el software personalizado generará todos los archivos necesarios. Este enfoque de diseño está diseñado para robots pequeños, lo que permite centrarse en diseños de alto nivel y reducir el tiempo de diseño de horas a segundos.
Este enfoque de diseño se ha utilizado junto con la impresión 3D para automatizar la fabricación. En el pasado, los fuselajes de la robótica desarrollada por el equipo estaban hechos de estructuras bidimensionales de fibra de carbono que requerían ensamblaje manual bajo un microscopio, lo que requería una gran habilidad y una amplia capacitación. En el estudio, para un solo trabajo de impresión, se produjeron componentes para construir 64 unidades de robot.
Excursión de insectos motorizada coordinada
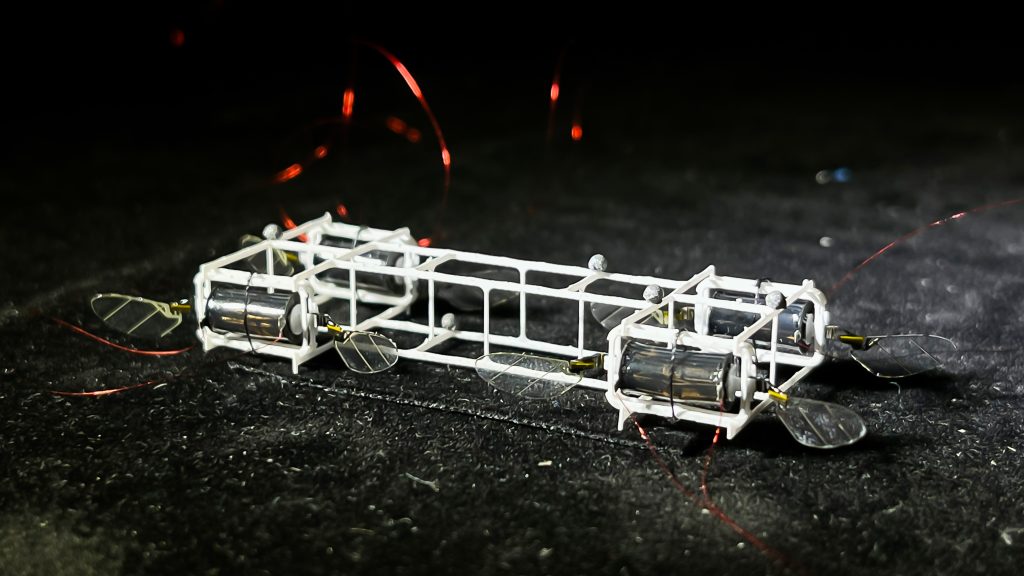
Los robots en el estudio actual se parecen a las abejas, batiendo sus diminutas alas 400 veces por segundo para despegar del suelo. En comparación con los robots anteriores del mismo equipo de investigación, estos robots con piezas impresas en 3D mostraron una mayor consistencia en su capacidad de volar sin ajustes extensos de hardware y software.
La transferencia masiva de carga útil es particularmente importante para los pequeños robots aéreos. Si bien un robot por sí solo tiene una carga útil muy limitada, en conjunto puede transportar objetos más pesados y más grandes. El estudio demostró el vuelo coordinado de dos robots que vuelan uno al lado del otro, y lo que es más impresionante es que pueden volar juntos mientras sostienen un objeto largo.
En el futuro, se podrían implementar pequeños robots para construir estructuras colectivas en entornos abarrotados, como construir una colmena en la rama de un árbol. Alternativamente, se pueden usar para eliminar materiales peligrosos de una ubicación a la que los bots grandes no pueden ingresar fácilmente.
Aunque el vuelo coordinado se demostró por primera vez en robots del tamaño de un insecto, que pesan menos que un clip, queda un largo camino por recorrer antes de que se logre la cooperación de un enjambre similar a un insecto.
La cooperación de los insectos parece automática, toman decisiones individuales comunicándose con sus vecinos. Sin un líder central, un enjambre de insectos puede realizar colectivamente tareas asombrosamente complejas, como construir colmenas o defenderse de los depredadores. El comportamiento de los enjambres de insectos permite que docenas, cientos o incluso miles de individuos trabajen juntos.
El equipo está interesado en explorar algoritmos de enjambre y aplicarlos a un mayor número de sus bots. En el proceso, surgirán nuevos desafíos. Por ejemplo, cuando hay más robots volando en un espacio pequeño, a menudo chocarán entre sí mientras vuelan.
Los investigadores estudian las colisiones en vuelo y desarrollan dispositivos de control de recuperación de vuelo. Esperan que algún día un pequeño equipo de sus robots pueda polinizar flores en masa.
Referencia: Yufeng Chen, et al., Fabricación modular y escalable de robots aéreos a escala de insectos para demostrar vuelos en enjambreSistemas Inteligentes Avanzados (2023). DOI: 10.1002/aisy.202300059

«Pensador incondicional. Aficionado a la televisión galardonado. Emprendedor total. Evangelista de la web. Nerd del café».